UCLA Mobility Lab’s Smart Intersection was awarded a $100,000 prize as one of 15 recipients of the USDOT Intersection Safety Challenge Stage 1A. UCLA Smart Intersection is the first real-world multi-agent multi-modality Vehicle-to-Everything (V2X) cooperative perception application in autonomous driving.
It features:
-
Served as a living lab for intelligent transportation system research.
-
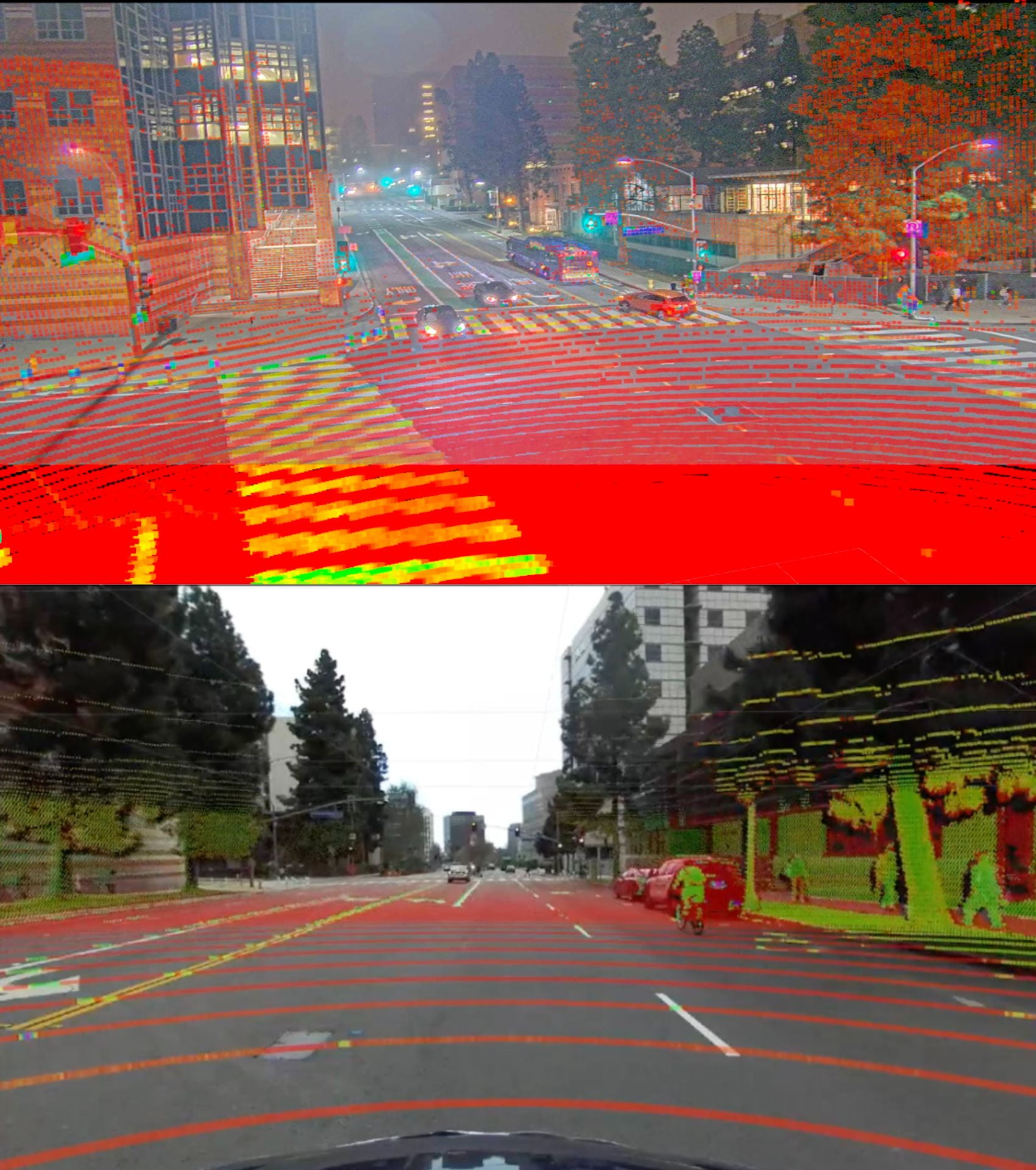
Enables us to collect data from infrastructure LiDAR, camera, and radar and combine them with sensor data including LiDAR, camera and global navigation satellite system and inertial measurement unit from CAVs to perform cooperative perception research.
-
To allow us to collect a comprehensive dataset from multi-modality sensors mounted on the multi-agent.
-
High-definition (HD) map at the smart intersection is provided.
-
Developed the systematic cooperative perception software platform.

{kind=link}